KAIST (Korea Advanced Institute of Science and Technology (Chancellor Kang Seong-mo)) has developed robotic skin that can measure outside contact with silicon and carbon material. This robotic skin can be used as a new type of computer interface.
KAIST made an announcement on the 2nd that a research team led by Professor Kim Jung and Park In-kyu of KAIST Mechanical Engineering Department has developed a robotic tactile sensor that greatly improves durability and ability to detect sense of touch.
Current robotic sensing technologies in sight and hearing are nearing human senses. However there are limitations in sense of touch since all parts of robots need to detect changes in environment. Technology that can distribute and connect sensors throughout skin is necessary and high flexibility and durability are needed as well.
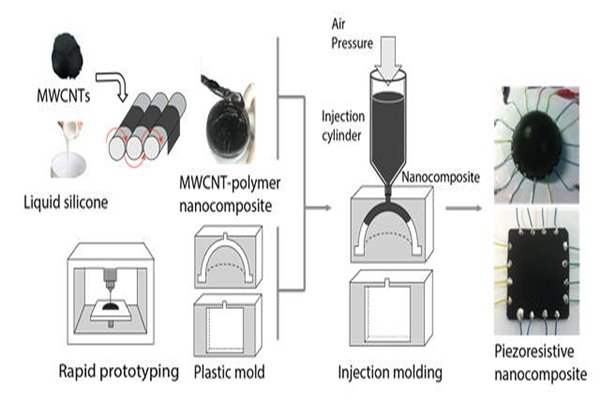
Research team has made sensor-skin with ‘piezoresistive composite’ that combines silicon and carbon nanotube (CNT). This composite has property to change value of electric resistance on corresponding parts when pressure is exerted from outside.
Research team applied EIT (Electric Impedance Tomography), which is a medical image technique, in measuring value of changes in resistance. It attached many electrodes on the surface of sensors and let current flow through them which allow robots to calculate potential difference of current and distribution of resistance inside of sensors.
Sensors can even withstand impact that is caused by hammering. Even when parts of sensors are broken, they can be reusable by filling and hardening piezoresistive composite into damaged parts.
It is also easy to make these sensors. These sensors are made by filling composites into 3D casts that are made from 3D printers and can be implemented as variety of forms such as 3D curved surface.
Research team explained that this sensor can be applied to variety of fields such as robotic skin that can absorb impact, 3D computer interface, and new types of touch sensors.
“These new sensors provide information on modified state from variety of dimensions.” said Professor Kim Jung. “They can be used for robotic industries including robotic skin and wearable medical devices.”
Staff Reporter Kim, Youngjun | kyj85@etnews.com